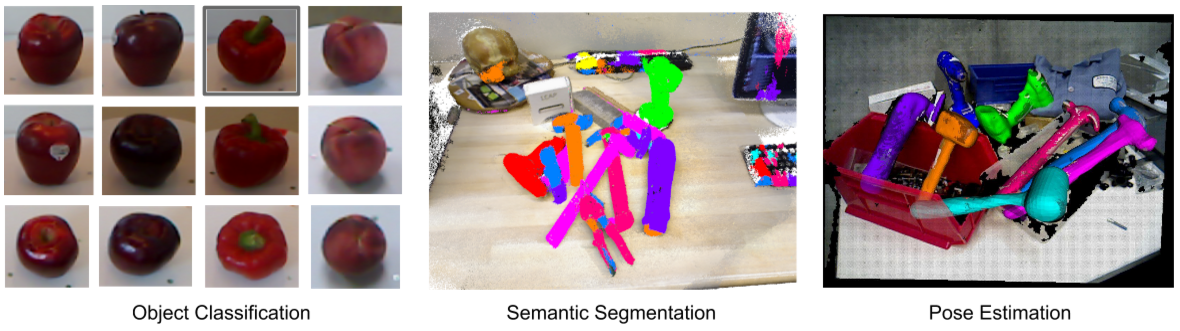
CIRL currently pursues to build robust visual perception systems for various robotic applications such as robot navigation, indoor home service and industrial manufacturing. We focus on a couple of core tasks in computer vision including object classification, semantic segmentation and 6-DoF pose estimation. In particular, we are interested in difficult perception scenarios involving densely cluttered scenes, heavy object occlusion and fine-grained object recognition. The following perception projects are funded by an NSF National Robotics Initiative Large grant: Multilateral Manipulation by Human-Robot Collaborative Systems.